Research Project MCYT DPI2001-2094-C03-02 (2001-2004)
Sistema Multiagente de Observadores Avanzados para Analisis y Reconocimiento de Escenas en Entornos Adversos
This project aims at designing and implementing a computer system based on multiagent technology that allows the coordination of a team of mobile robots endowed with sensory devices, in order that they deploy over an unstructured and possibly adverse environment, and cooperate for obtaining information about it. Information acquired in a distributed manner by the robotic team must be analyzed and integrated with the purpose of obtaining a complete and precise computer model of the recognized area. That model will simplify further both planning and decision making activities performed by other agents in charge of the execution of more complex tasks related to the aforementioned environment (rescue personnel, fire brigades, etc.). Hence, the goals of this project are similar to those of the Robocup Rescue Robot League, although we do not pretend to participate in the tournament.
The team of explorers is constituted by two Koala robots and a Pioneer P2-AT robot. The three robots are all-terrain. Each Koala mounts two ultrasound-based range sensors and a ring of infrared proximity sensors. On the other hand, the P2-AT is endowed with a ring of ultrasound-based range sensors, a trinocular Color Digiclops camera and two off-the-shelf webcams. Those sensors are controlled by an embedded computer. The three robots may communicate with each other and with external computers through a Bluetooth wireless network.
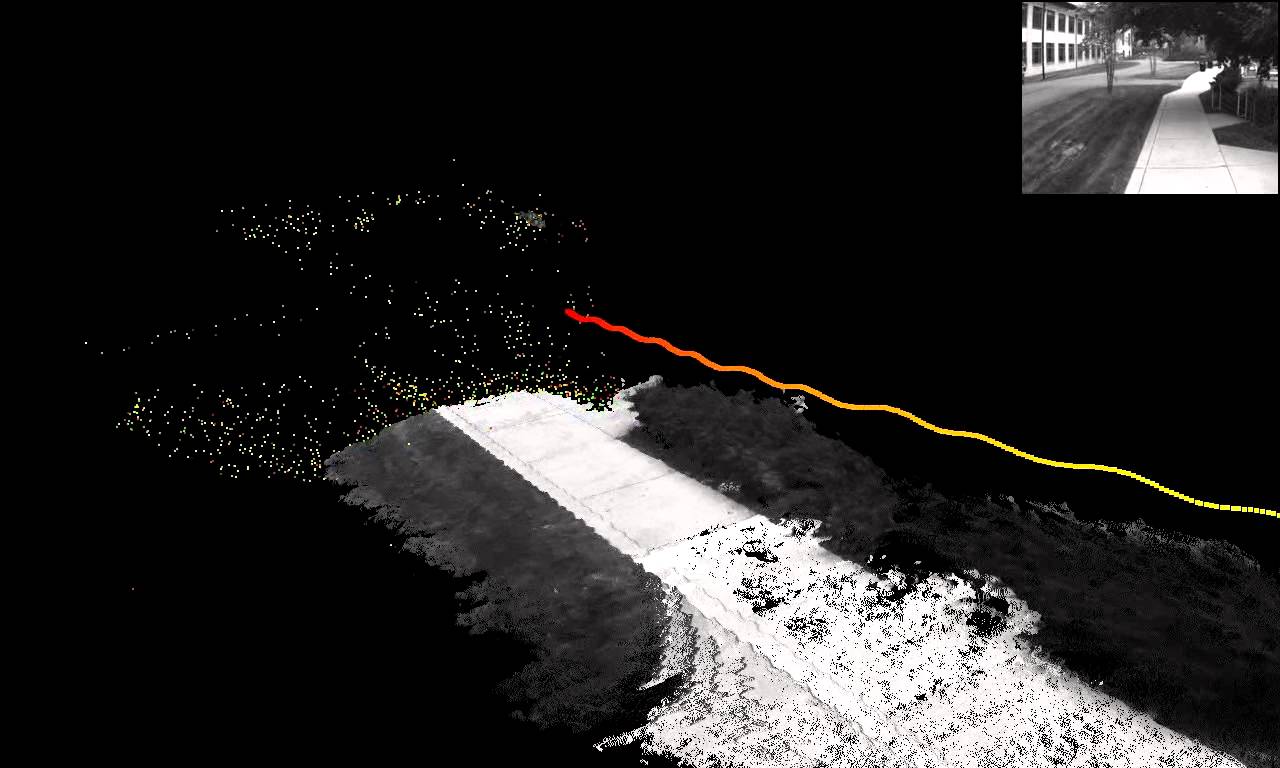
The specific goal of this project is that both Koala robots deploy over an unknown environment in a coordinated manner, obtaining a map of it (occupancy grid) which indicates the location of free areas, as well as obstacles detected by both the ultrasound sensors and the infrared ring. From this map, the P2-AT robot must wander over the environment with the aim of building a detailed 3D model of the scene from the images acquired by the stereo camera. The P2-AT robot will preferentially move towards areas with possible victims (unknown objects whose appearance does not coincide with the most part of the environment). Unknown objects will be identified by the Koalas through information provided by their infrared sensors, and, alternatively, by the P2-AT after applying texture analysis to the images acquired by the trinocular camera and/or the webcams.
This project is a part of a larger coordinated project entitled: Design and Planning of Dynamic Physical Agents (“Diseno y Planificacion de Agentes Fisicos Dinamicos”) MCYT DPI2001-2094-C03.